







1. مبدأ العمل
يستخدم الحل شاشة COF DMG80480F070_01WTR ، والتي تستخدم شريحة T5L كعنصر تحكم رئيسي لتلقي ومعالجة بيانات إمدادات المياه التي تم جمعها بواسطة المستشعرات ، وتشغيل شاشة LCD لعرض البيانات والتحكم في العاكس لضبط سرعة محرك المضخة لتحقيق تأثير ثابت ومستقر لنظام إمدادات المياه.هناك وظائف غير طبيعية لإعدادات التحذير ومشاركة الوقت لإمداد المياه.

2. تصميم المخطط
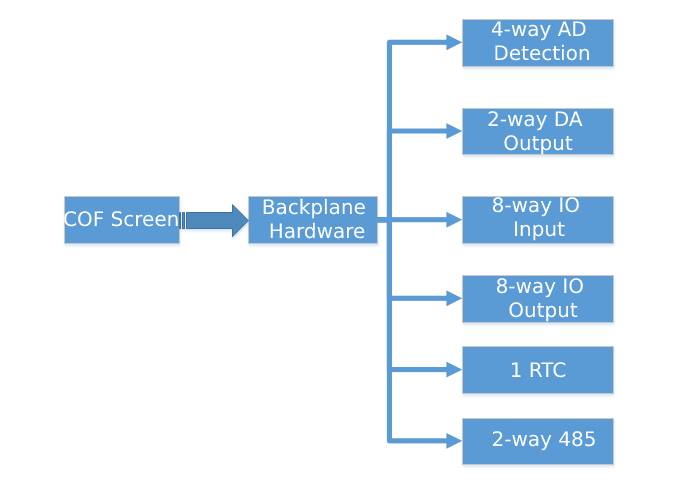
(1) مخطط كتلة المخطط
(2) مخطط كتلة الأجهزة
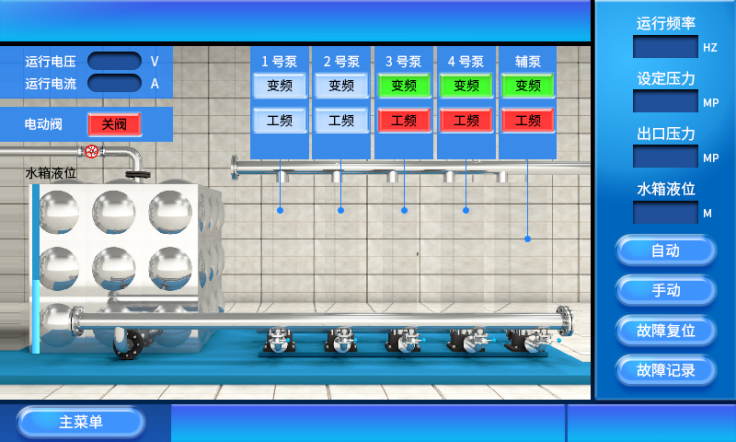
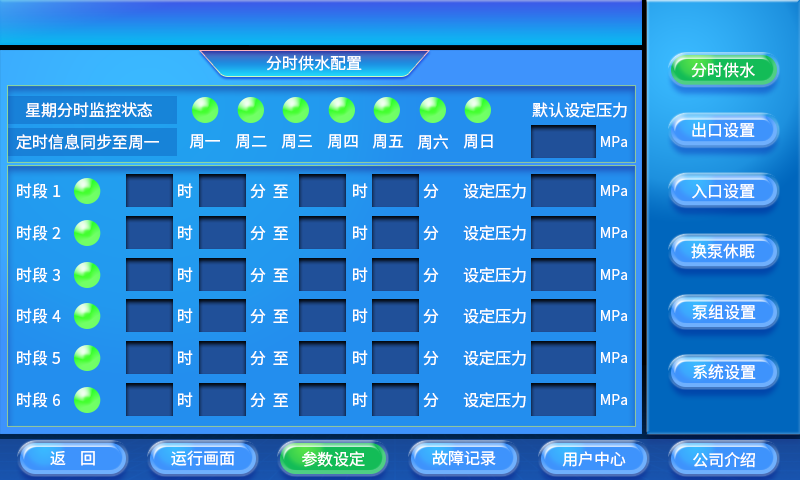
(3) تصميم واجهة DGUS GUI
(4) تصميم الدوائر
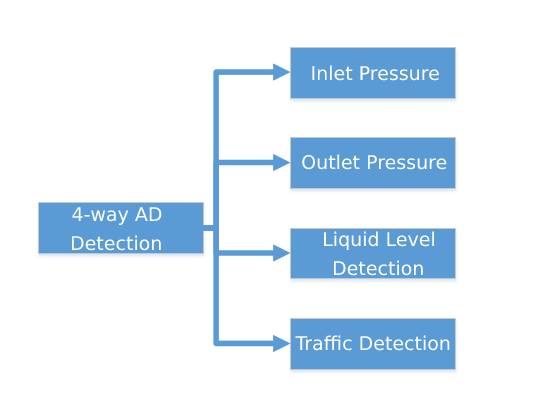
1. م
يجمع بشكل أساسي أجهزة الاستشعار التقليدية 4-20MA / 0-5V ، ويحول نوع الجهد الحالي إلى 0-3V ، وبعد حساب AD يمكن الحصول علىبيانات الاستشعار المقابلة.
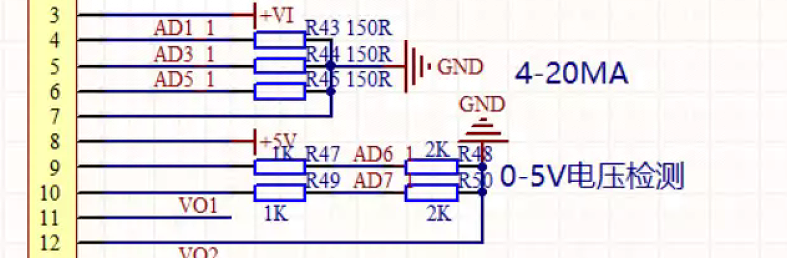
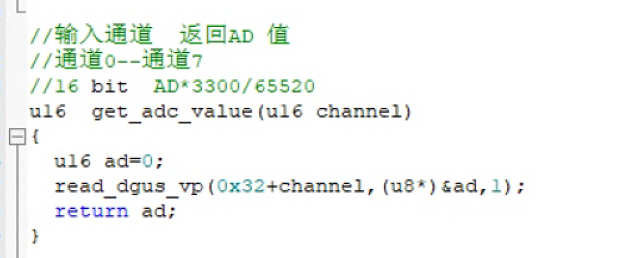
كود مرجع AD
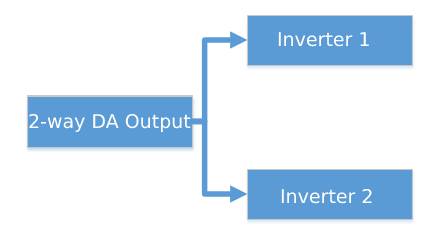
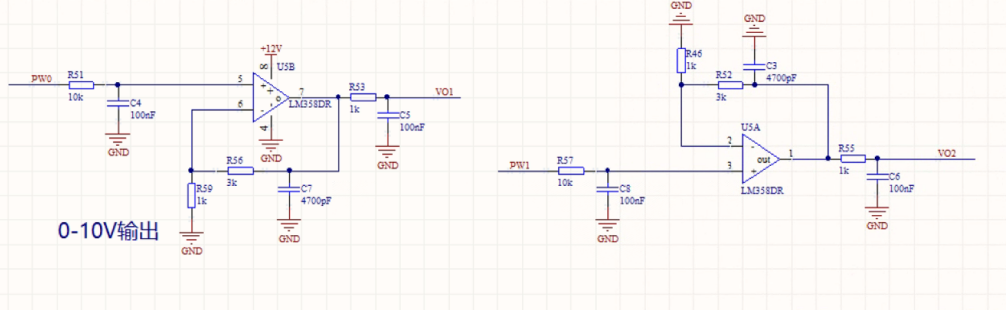
2.DA
يتم استخدام pwm للتحكم في الجهد التماثلي وإخراج إشارة تحكم 0-10 فولت من خلال المرجع أمبير.
تخطيطي للكشف عن التيار المستمر
DC التخطيطي للأجهزة
الرمز المرجعي DC
3. قسم مدخلات تقنية المعلومات
بشكل أساسي مدخلات optocoupler ، يكتشف T5L تغييرات المستوى المقابلة.
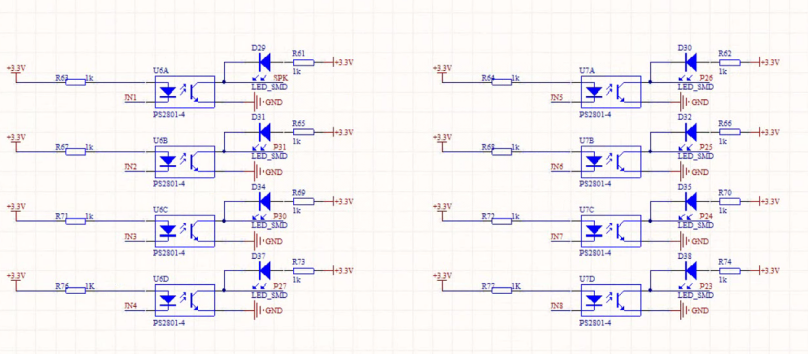
IO التخطيطي للأجهزة
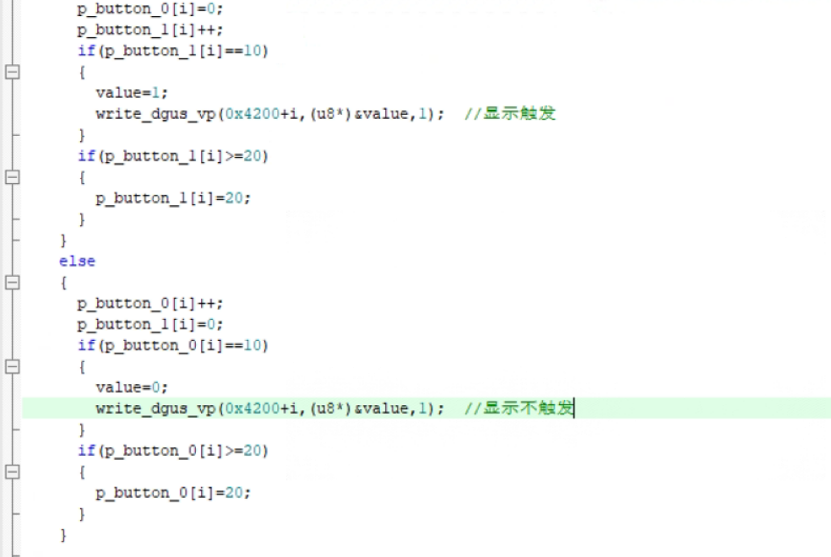
كود مرجع إدخال IO
4.IO الإخراج
مرحلات التحكم في مخرجات دارلينجتون ترانزستور IO الرئيسية وتتحكم IO في المستويات العالية والمنخفضة.
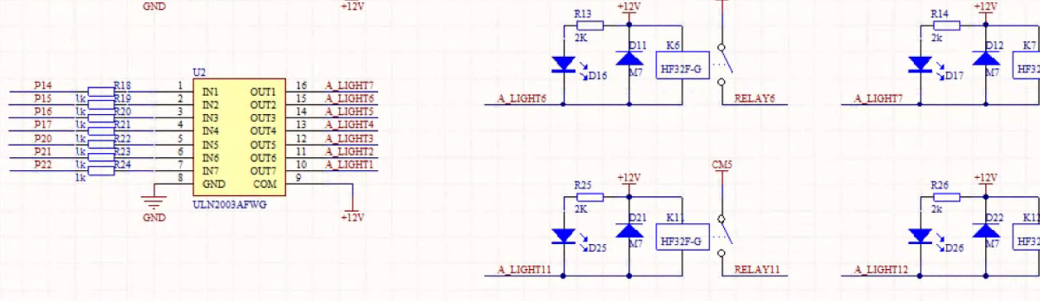
مخطط أجهزة الترحيل
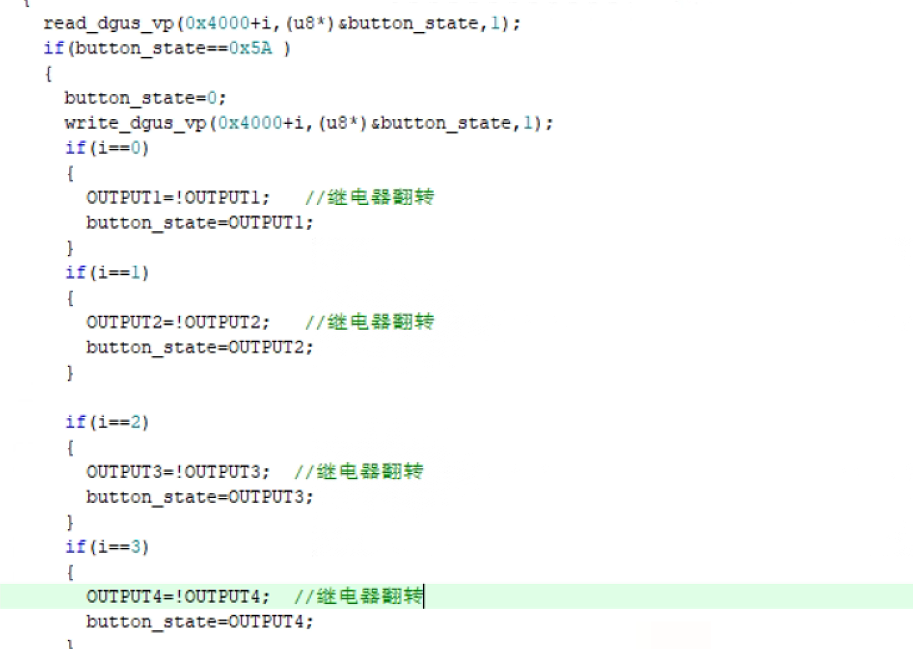
الكود المرجعي للترحيل
5.RTC
RX8130 ، اتصال ثنائي الأسلاك.
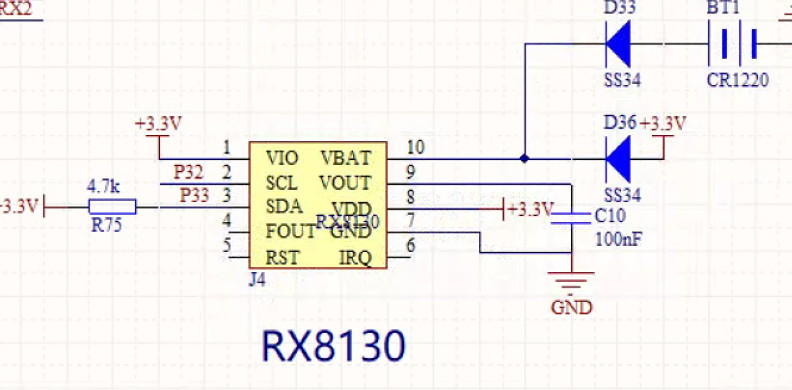
مخطط الأجهزة RTC
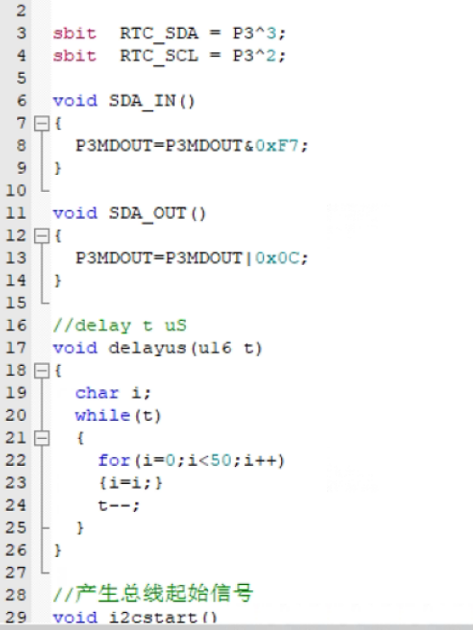
رمز مرجع RTC
6.485
استخدم الأجهزة بشكل أساسي للتحكم في دبابيس الإرسال والاستلام.
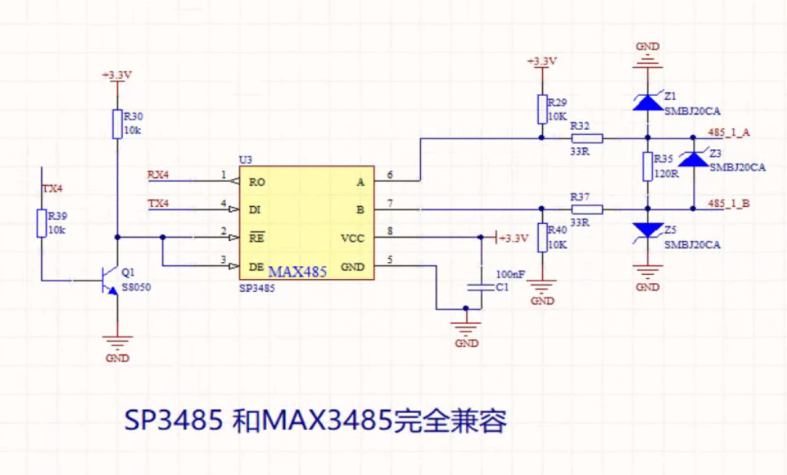
485 الأجهزة التخطيطية
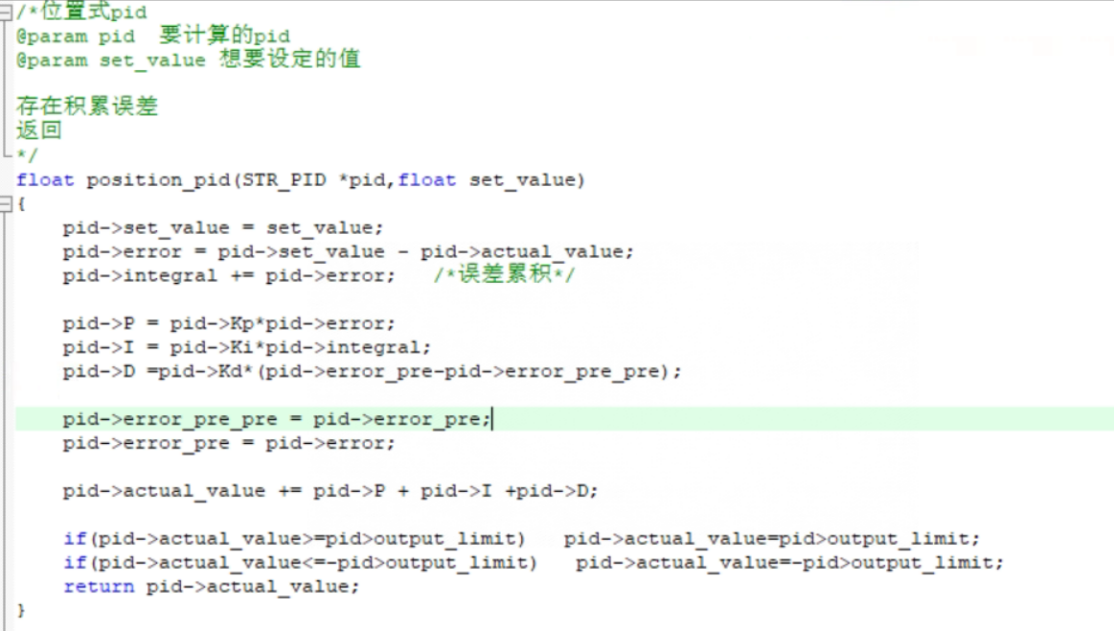
7.PID
يتم استخدام خوارزمية PID الموضعية بشكل أساسي ، والإخراج محدود ، والانتباه إلى تشبع المصطلح المتكامل ، والنتيجة هي التحكم في الجهد التناظري لـ PWM.
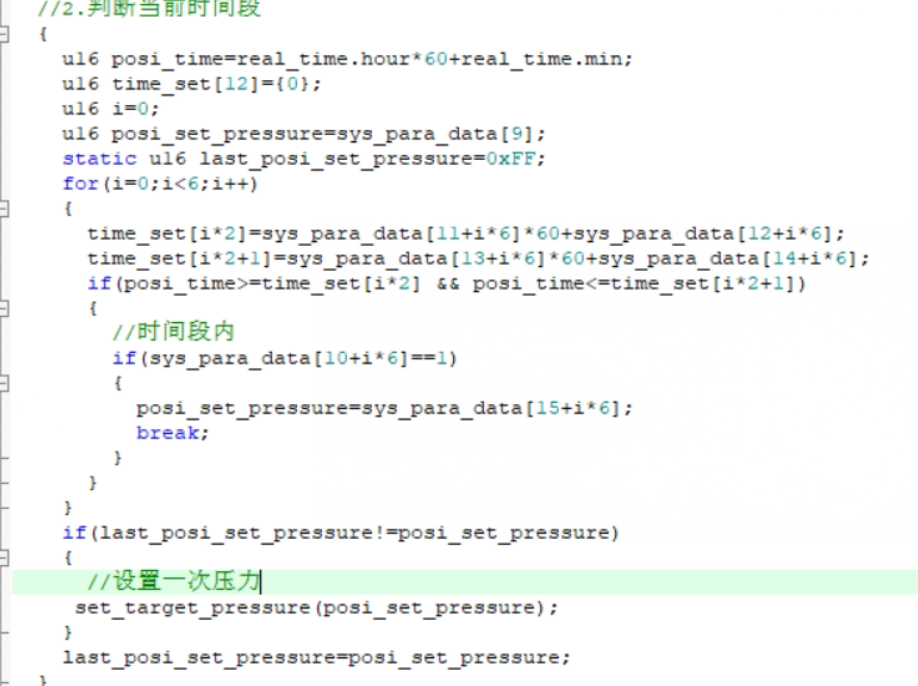
8- رموز أخرى
ضبط تلقائي لضغط البدء حسب الوقت.
الوقت ما بعد: 30 نوفمبر - 2022